Research on Joint Evolution in Quadruped Robots
Published:
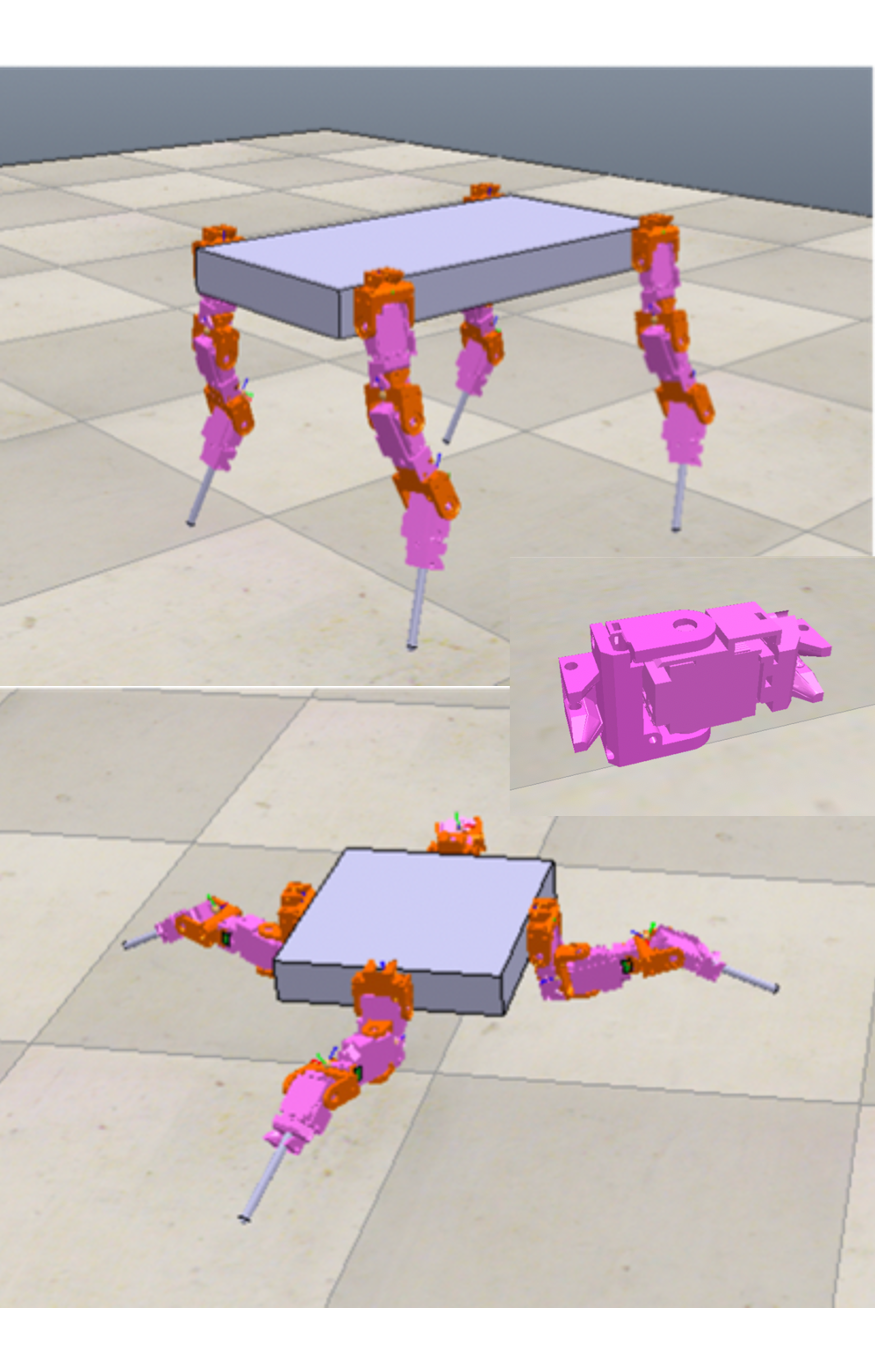
This project explores joint evolution in quadruped robots, using a joint design from the EPSRC-funded Autonomous Robot Evolution Project to construct two distinct robots within the V-REP (CoppeliaSim) simulation environment. A neuroevolutionary approach is employed to evolve the robots’ joints, with the aim of enhancing mobility and obtaining genetic traits associated with faster movement. The study involves evolving 100 generations, each consisting of 50 individuals, for a total of 5,000 individuals. The individual with the highest fitness score, determined by speed, is selected to retrieve its corresponding genome information, representing the optimal configuration under the fitness function. The two quadruped robots exhibit differing fitness values, suggesting that joint configuration impacts evolutionary outcomes. Therefore, to design the most effective robot, both the joints (controllers) and their configurations must be co-evolved. The results demonstrate that legged robots can adapt and increase mobility through evolutionary methods, making them capable of evolving based on specific performance requirements.