Accurate Positioning of the End Effector of a 7-DOF Manipulator
Published:
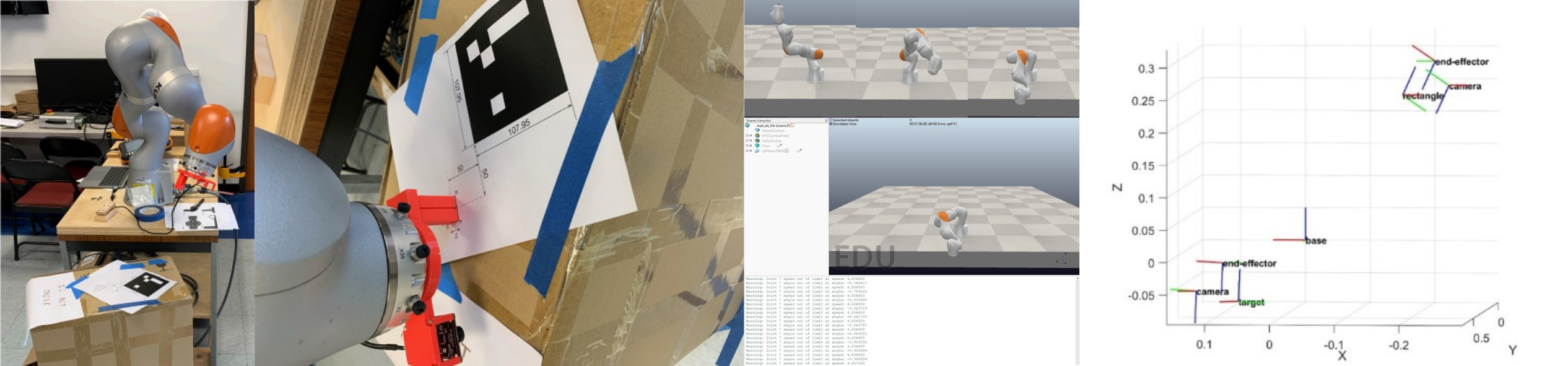
This project, part of the UD graduate course MEEG671: Introduction to Robotics under the supervision of Dr. Panagiotis Artemiadis, focuses on accurate end-effector positioning for a 7-DOF manipulator (LBR iiwa 7 R800, KUKA) using Aruco Marker recognition. The goal is to create a trajectory for the manipulator, equipped with a camera and a rectangular attachment, to precisely align the shape over a target based on the marker’s location and orientation. The manipulator begins at initial configuration and must avoid collisions during the motion. The project involves several key tasks:
- Analysis of DH parameters, transformation matrices, forward kinematics, and inverse kinematics using the inverse Jacobian.
- Trajectory planning to ensure smooth and collision-free motion.
- Simulation validation in CoppeliaSim.
- Final computation of the end-effector’s positioning error in MATLAB, which was determined to be around 0.003mm.