About Me
I'm currently a Ph.D. candidate in the Department of Mechanical Engineering at the University of Delaware (UD). I work as a research assistant in the Soft Microrobots for Tissue Engineering Lab (SMT), supervised by Dr. Sambeeta Das. My research interests include microrobotics, soft robotics, motion planning, and robot learning.
I obtained my B.E. in Measurement, Control Technology and Instrumentation from the Beijing Jiaotong University (BJTU) in 2019 and an M.Sc. in Robotics from the University of Bristol (UoB) in 2020. During my graduate study, I completed my master's thesis at the Bristol Robotics Laboratory (BRL).
Before joining UD, I was a research assistant in the Advanced Actuators and Robotics Lab (AAR) at the Southern University of Science and Technology (SUSTech), supervised by Dr. Hongqiang Wang. From Oct–Dec 2024, I was a full-time visiting graduate student in the Johan Paulsson Lab at Harvard Medical School.
News
-
Our new paper was accepted to IROS 2026.
-
Selected as a University of Delaware nominee for the Google PhD Fellowship.
-
Our new paper was published in Advanced Robotics Research.
-
Our new paper was published in Science Advances.
-
Invited talk at the 2026 Gordon Research Seminar on Robotics (GRS).
-
Oral presentation at the 2026 MRS Spring Meeting & Exhibit.
-
Oral presentation at the ERN Conference in STEM 2026.
-
Passed Ph.D. candidacy exam.
-
Presented a poster at the 2024 MRS Fall Meeting & Exhibit.
-
Our new paper was published in IEEE Transactions on Biomedical Engineering.
-
Began as a full-time visiting graduate student at Harvard Medical School.
-
Passed Ph.D. qualifying exam.
-
Two papers were published at MARSS; one was nominated for the Best Student Paper Award.
Research
Developed a contact-gated residual reinforcement learning controller that augments model predictive control for robust magnetic microrobotic cell pushing under time-varying microfluidic flow.
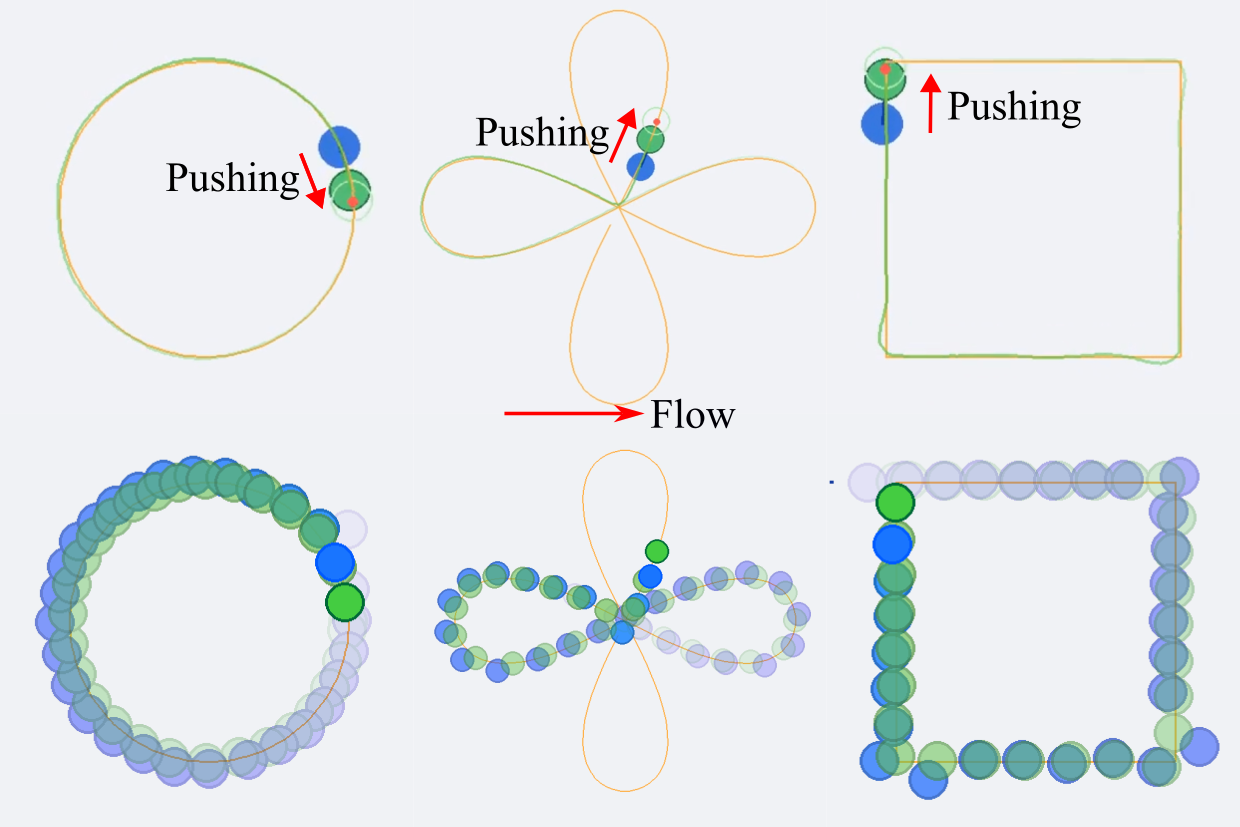
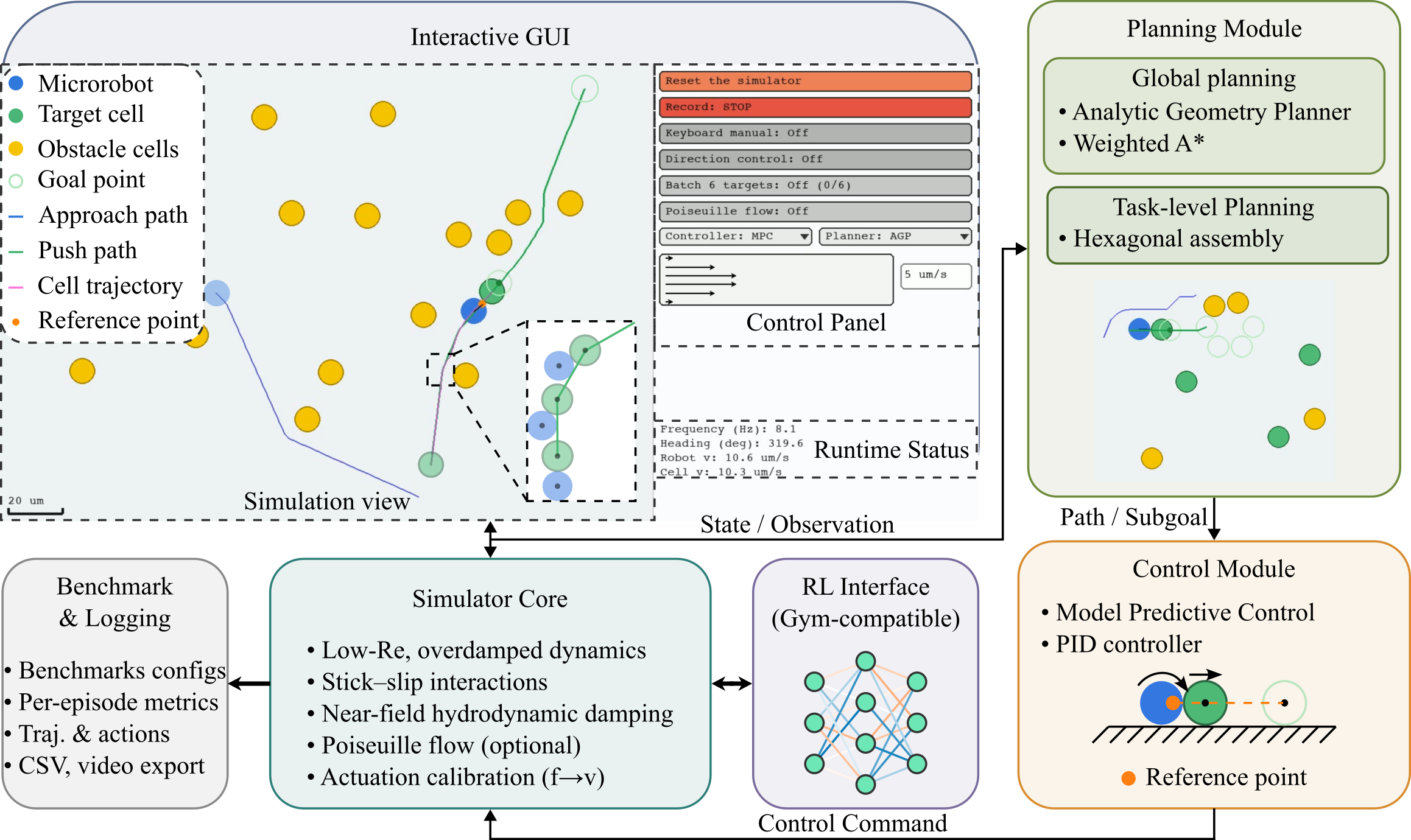
Developed an open-source simulator and benchmark suite for contact-rich microrobotic cell pushing and multi-target assembly, with modular planning, control, and reinforcement-learning interfaces for reproducible evaluation.
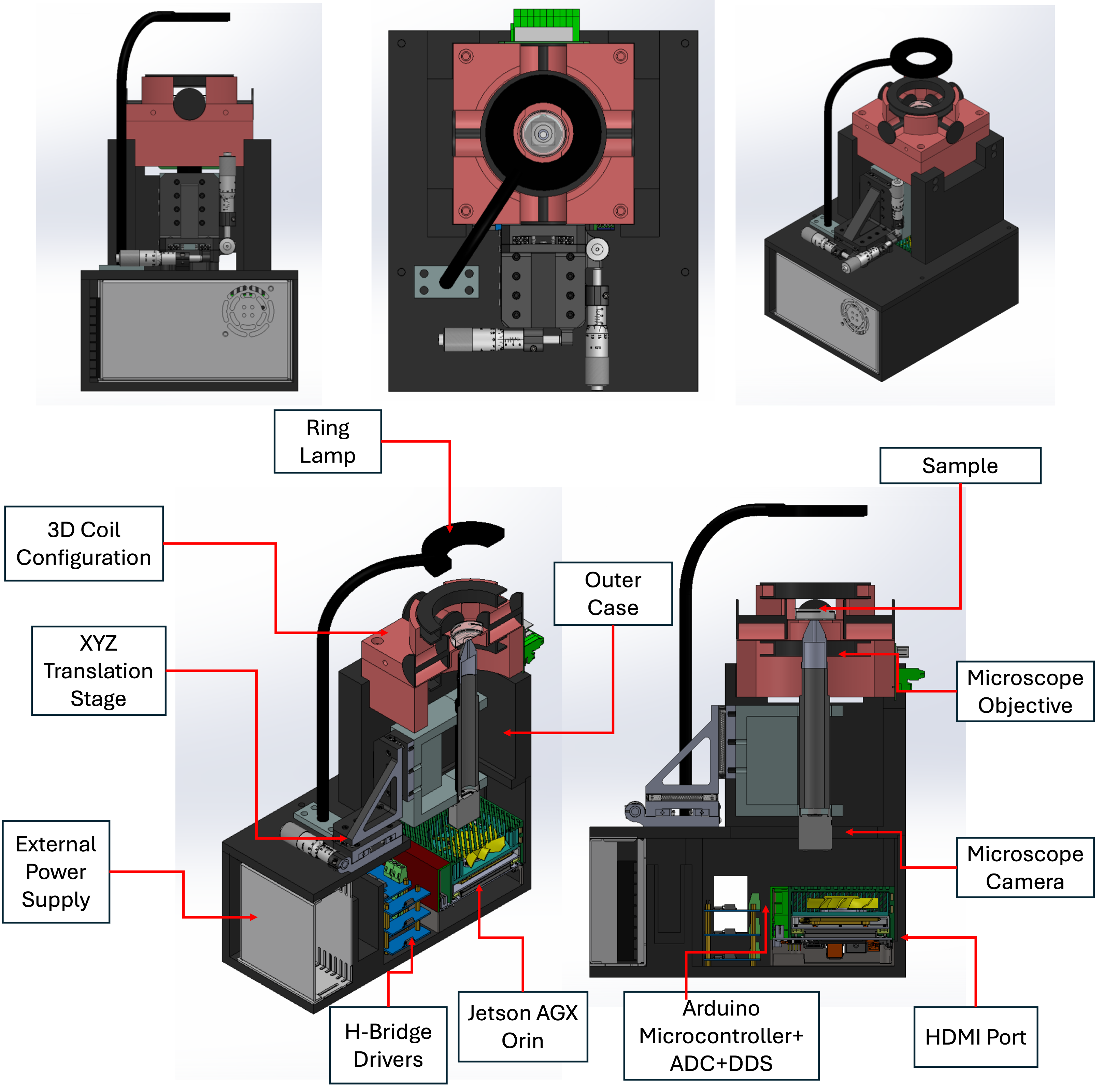
We developed MicroRoboScope, a portable and integrated platform for real-time closed-loop control of magnetic and acoustic microrobots, combining microscopy, actuation, tracking, and control software in a compact system.
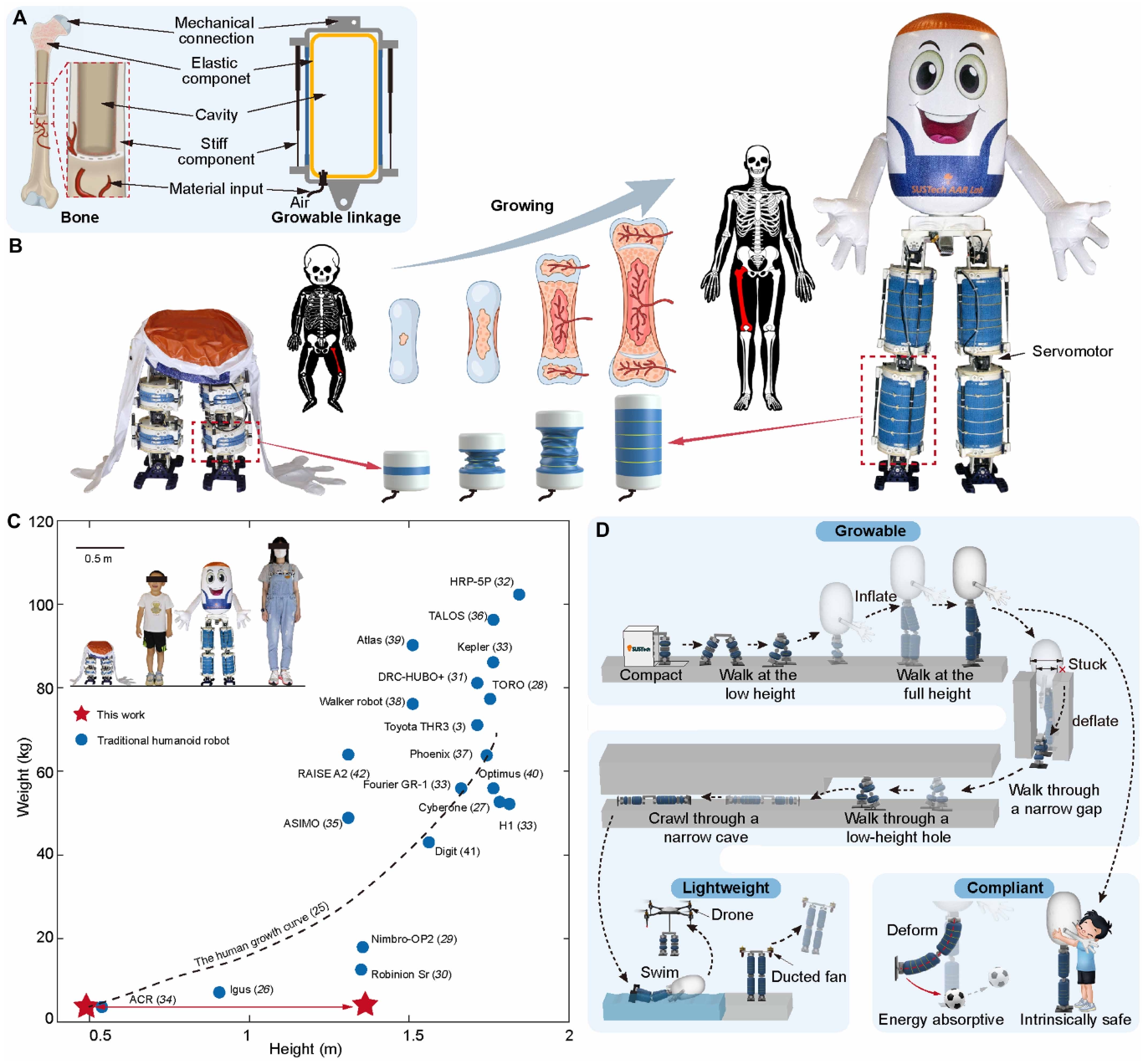
Developed a bioinspired growable humanoid robot with bone-mimetic linkages, enabling versatile multi-mode mobility and traversal through confined spaces.
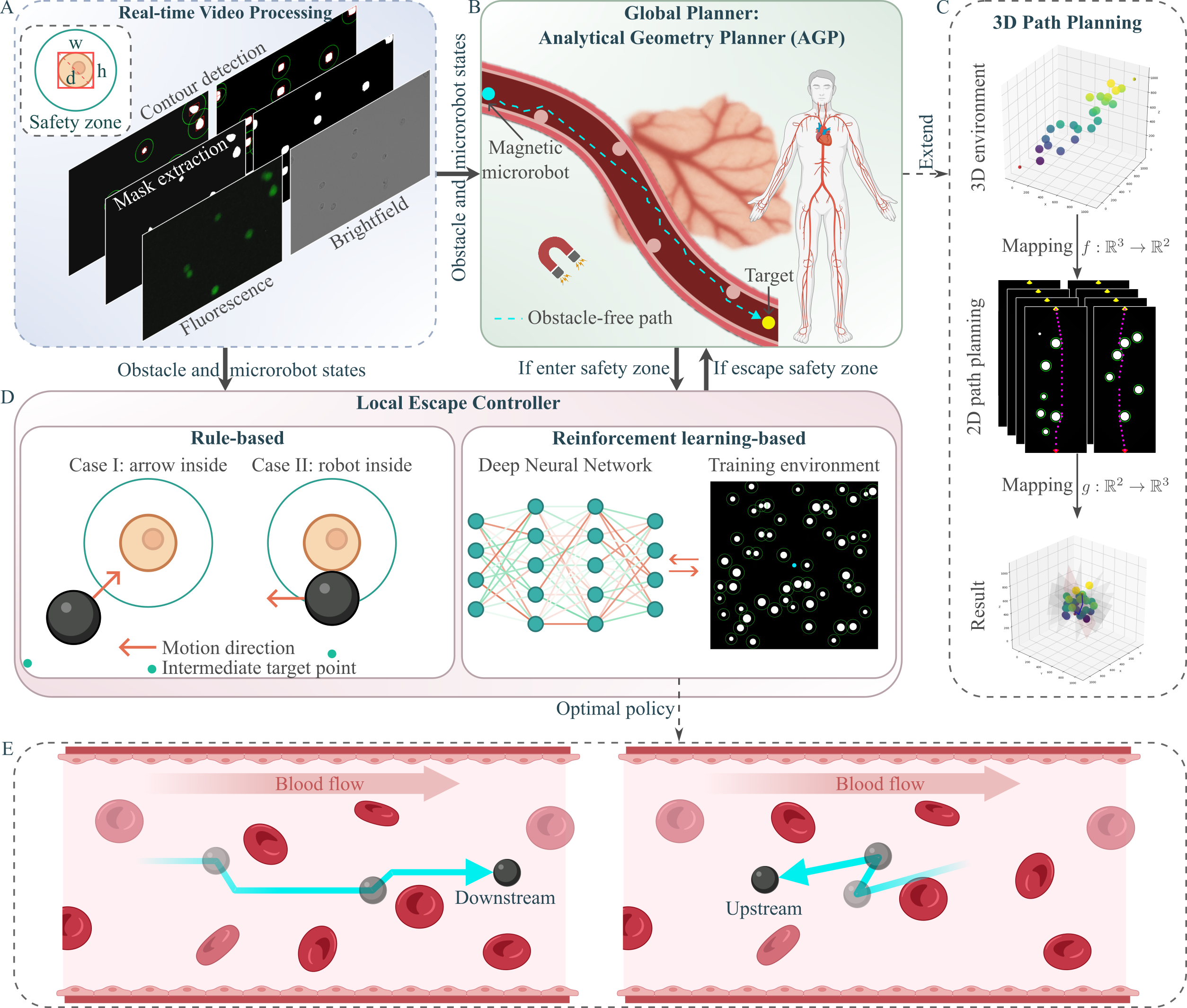
Developed a real-time framework that couples an analytic-geometry global planner (AGP) with local escape controllers (rule-based and RL-based) for microrobot navigation and dynamic obstacle avoidance.
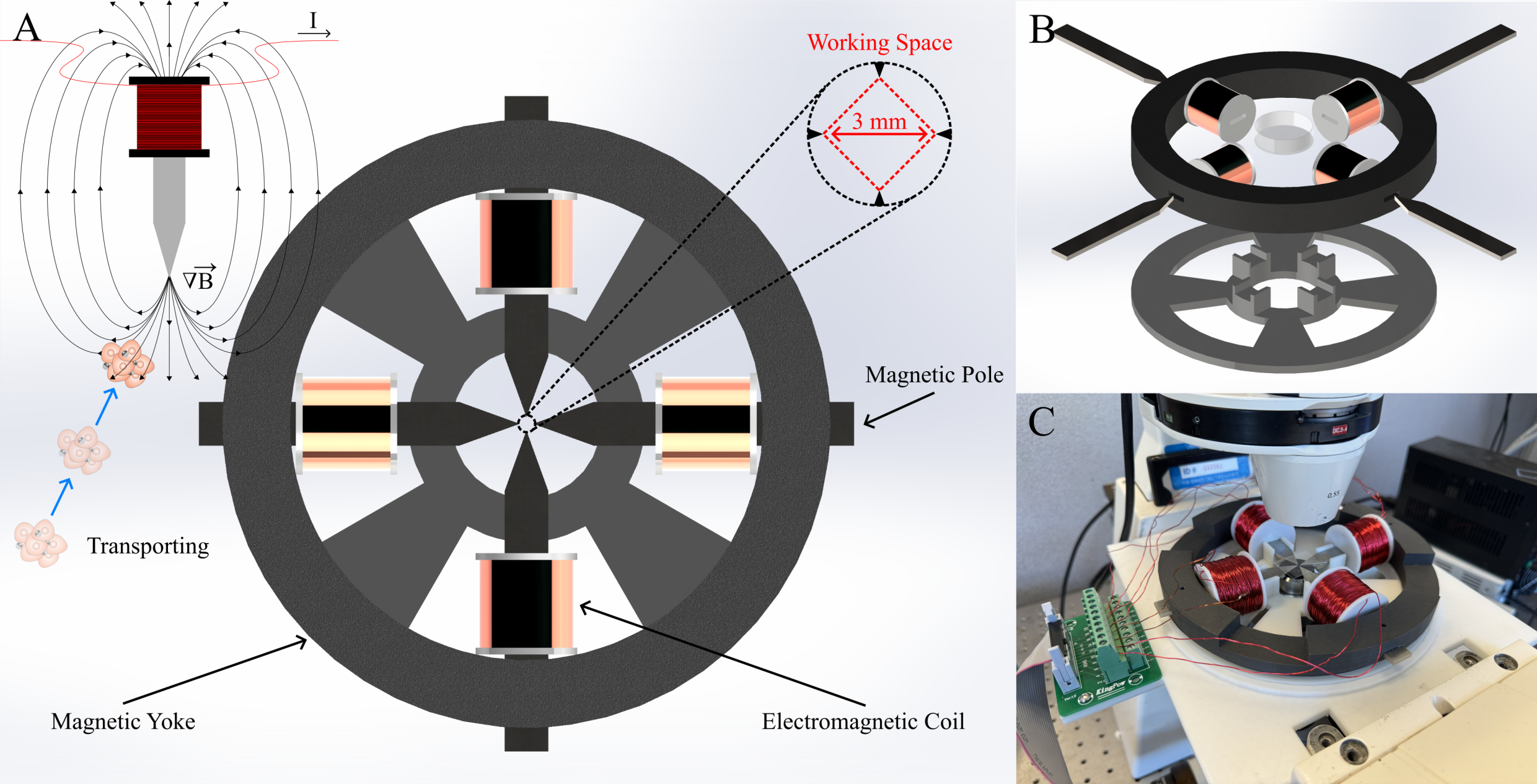
Built and validated a quadrupole magnetic tweezer system enabling precise cell transport.
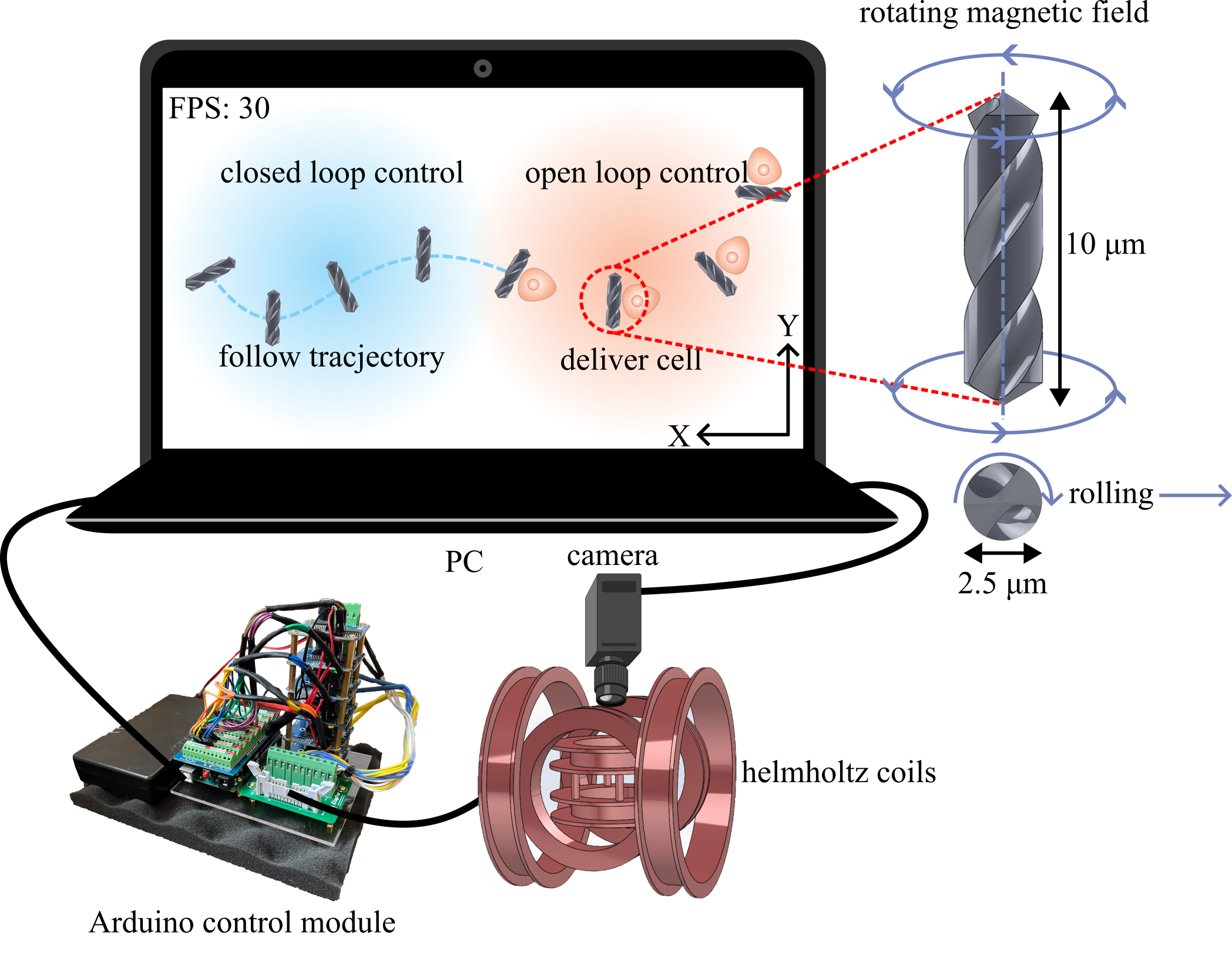
Designed a rolling helical microrobot for cell patterning and closed-loop control algorithm.
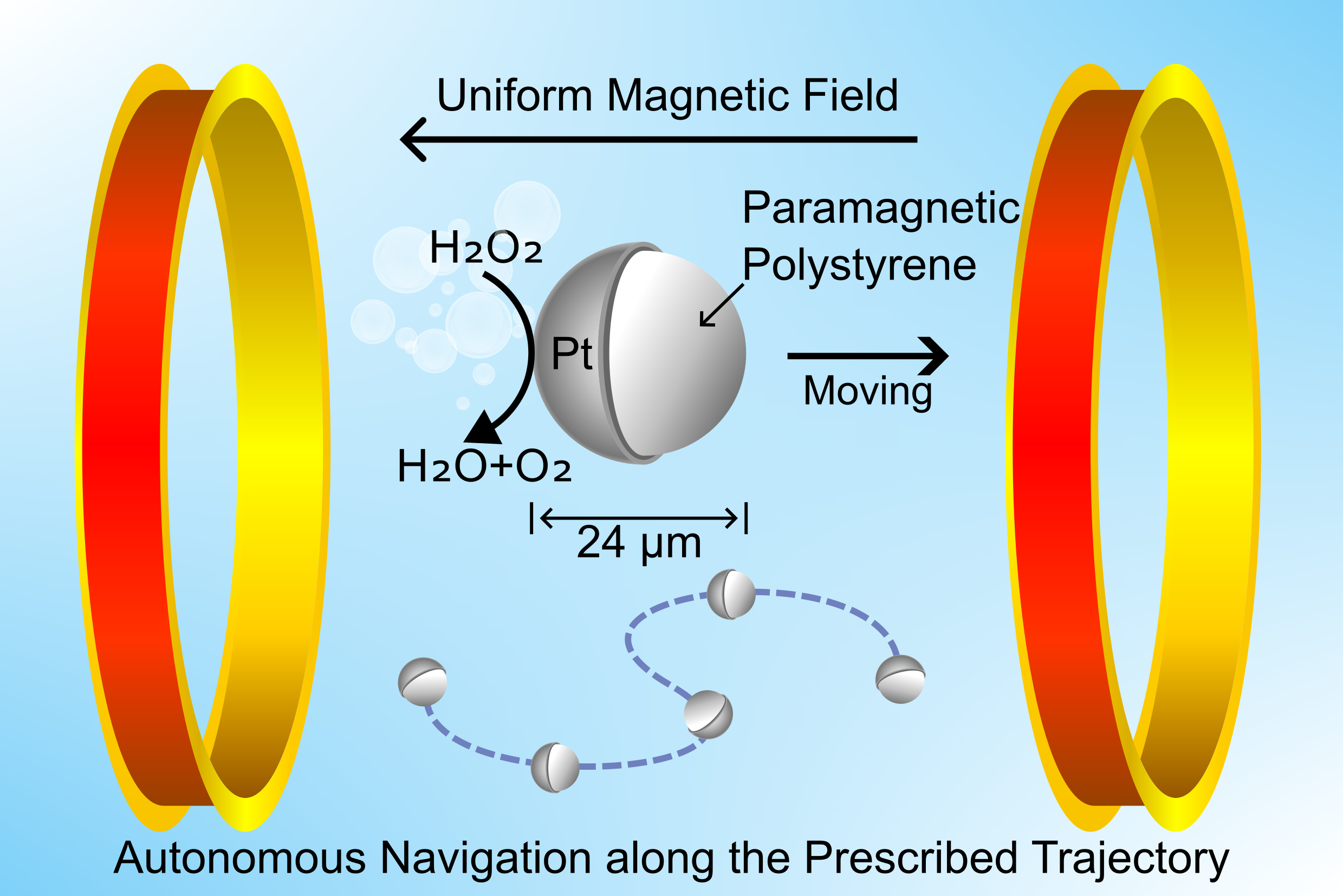
Developed the closed-loop control algorithm for bubble-propelled microrobots.
Projects
-
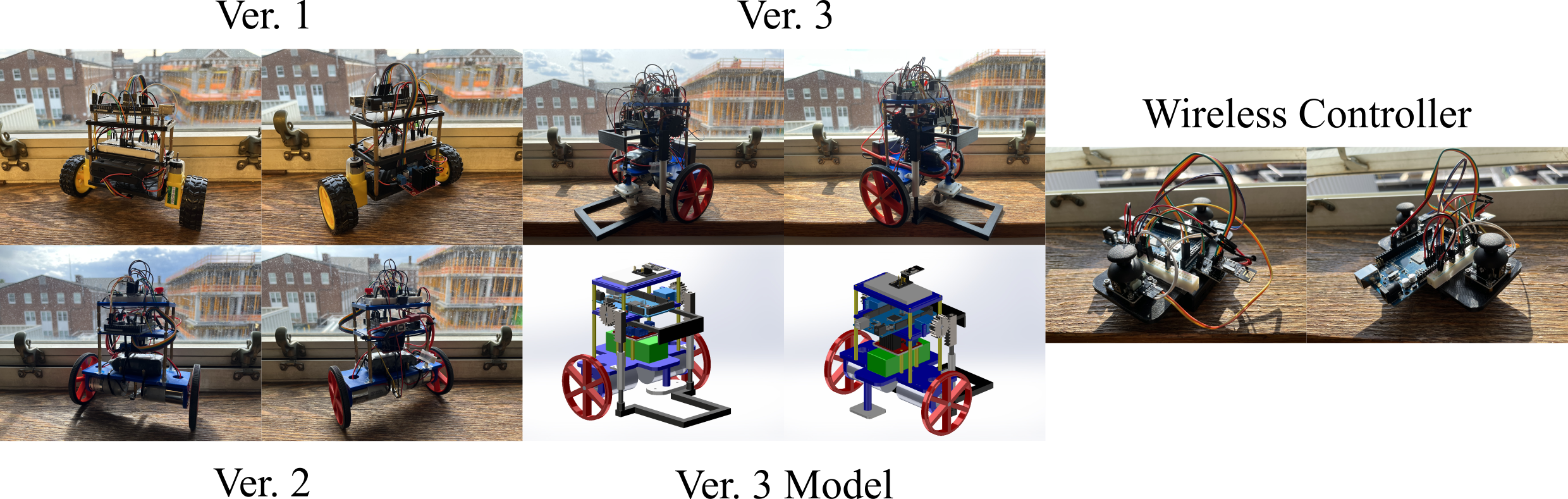
Two-Wheel Self-Balancing Robot
Designed a two-wheel self-balancing robot with accelerometer and custom wireless controller. Final version added wheels and a servo-powered lifting mechanism, demonstrated in competition.
-
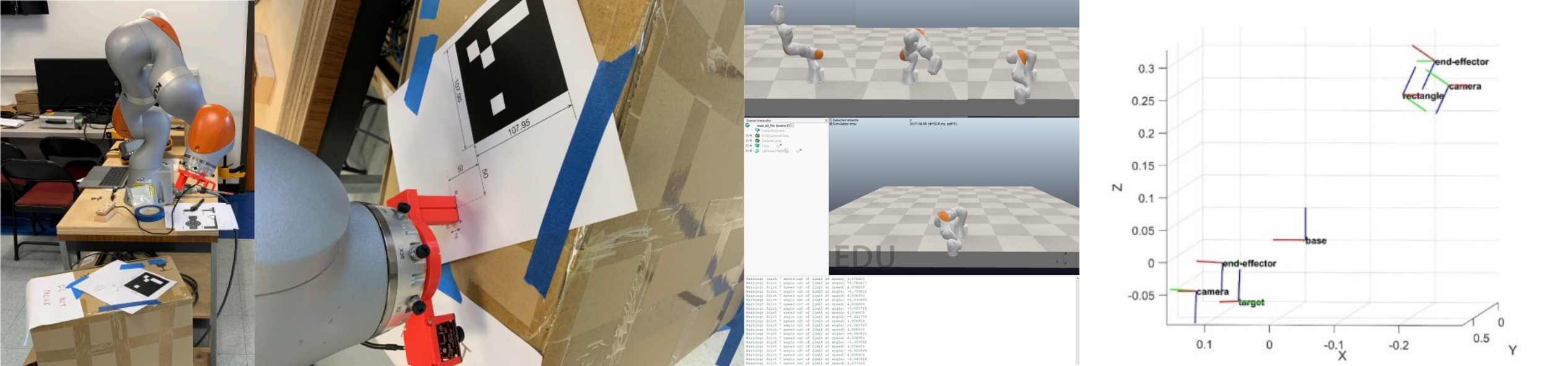
Accurate Positioning of the End Effector of a 7-DOF Manipulator
Project on accurate end-effector positioning for a 7-DOF KUKA manipulator using ArUco markers. Involved DH analysis, kinematics, trajectory planning, and validation on simulation and actual robot.
-
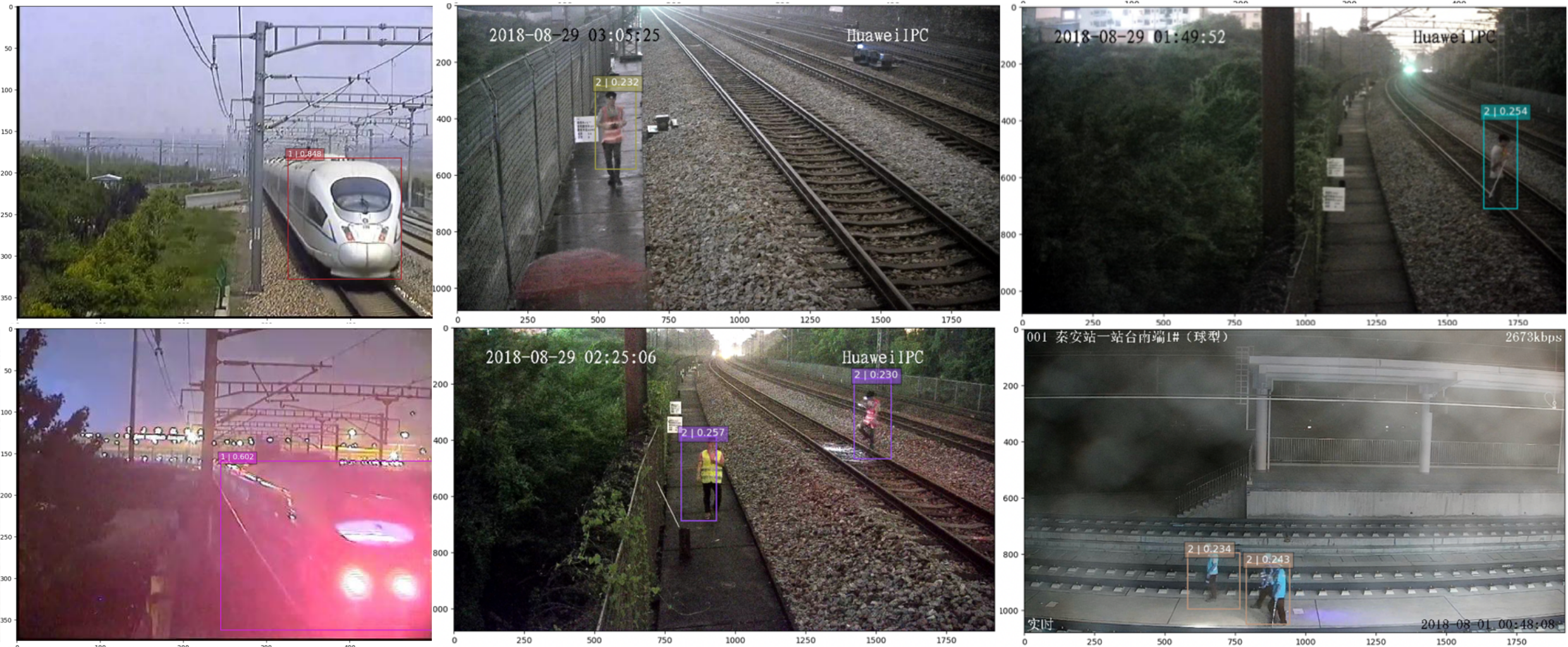
Railway Foreign Object Detection System Based on Deep Learning
Developed a high-speed railway foreign object detection system using SSD-based CNNs, achieving rapid and precise detection across diverse environments and weather conditions.
-
Automated Underground Circular Parking System Model
First Prize, 10th National Fischertechnik Engineering Technology Innovation Design Competition
Designed an underground circular parking system using Fischertechnik, enabling fully automated car storage and retrieval with integrated sensors and optimized motion control for efficiency.

Teaching
- Teaching Assistant — Introduction to Robotics (MEEG671), University of Delaware
Selected Presentations & Invited Talks
- Poster Presentation, 2024 MRS Fall Meeting & Exhibit.
- Invited Talk, 2026 Gordon Research Seminar on Robotics (GRS).
- Oral Presentation, 2026 ERN Conference in STEM.
- Oral Presentation, 2026 MRS Spring Meeting & Exhibit.
Honors & Awards
- University of Delaware Nominee, Google PhD Fellowship, 2026.
- Best Student Paper Award Nomination, MARSS 2023.
- First Prize, 10th National Fischertechnik Engineering Technology Innovation Design Competition.
Leadership & Service
-
Academic Service
Reviewer for IEEE Transactions on Automation Science and Engineering (T-ASE), IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), and IEEE Transactions on Robot Learning (T-RL).
-
Nemours Sickle Cell Science Fair
— Nemours Children’s Hospital, Wilmington DE
Led hands-on microrobotics demos with microscope-integrated magnetic actuation; explained clinical relevance and guided participants in micro-scale control.
-
UD Day in DC
— Russell Senate Office Building, Washington, D.C.
Delivered live demos of a portable magnetic actuation system integrated with a microscope; coached attendees to operate and control microrobots for targeted manipulation and navigation.
-
Science Camp for middle & high school students
— Massachusetts Institute of Technology, Cambridge MA
Co-led labs where students used joystick controllers to drive microrobots and manipulate cells, linking microengineering principles to real biomedical applications.
-
Full Day Camp for middle school students
— Boston University, Boston MA
Co-organized a day-long program featuring joystick-controller interfaces to steer microrobots under a microscope.