Two-Wheel Self-Balancing Robot
Published:
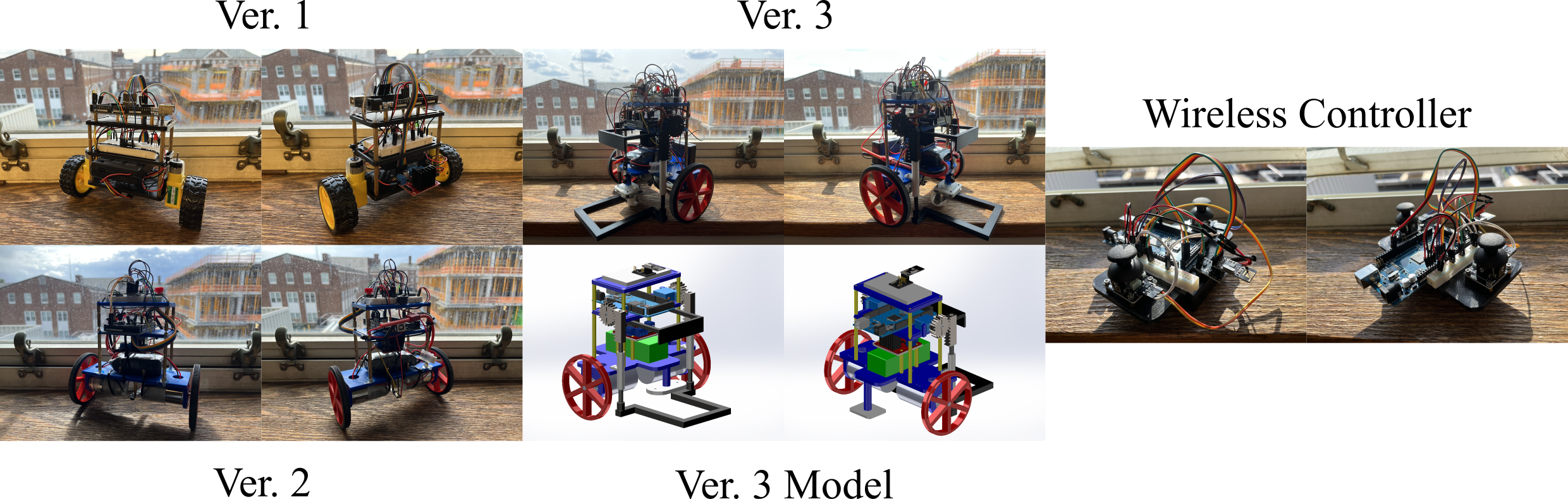
This project, completed as part of the UD graduate course MEEG667 Mechatronics under the supervision of Dr. Adam Wickenheiser, involved designing an intelligent vehicle to meet three specific milestones. For the first two milestones, I developed a two-wheeled robot equipped with an accelerometer, enabling it to self-balance. The robot demonstrated exceptional stability across various surfaces, quickly returning to a balanced position even when pushed. To enhance control, I built a custom wireless controller to manage speed and direction. For the final milestone, a competition with specific challenges, I modified the original design by adding two additional wheels for greater stability. A lifting mechanism, powered by two microservo motors, was integrated to pick up boxes from the ground, and the robot was equipped with a variety of sensors.