Page Not Found
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
This is a page not in th emain menu
Published:
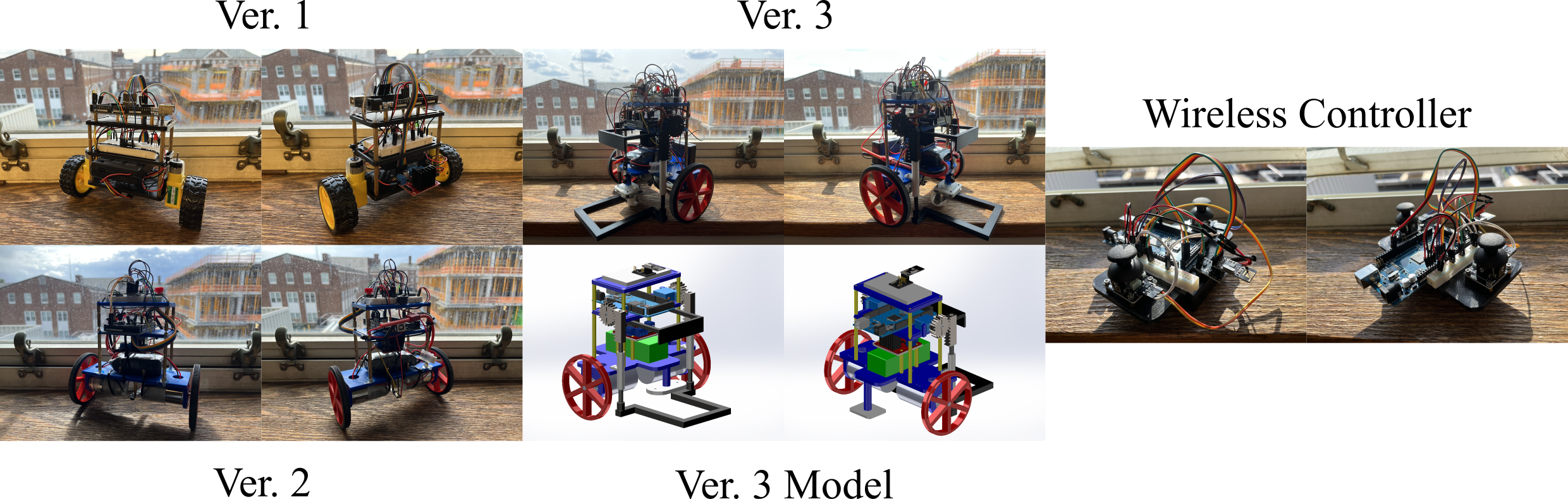
This project, completed as part of the UD graduate course MEEG667 Mechatronics under the supervision of Dr. Adam Wickenheiser, involved designing an intelligent vehicle to meet three specific milestones. For the first two milestones, I developed a two-wheeled robot equipped with an accelerometer, enabling it to self-balance. The robot demonstrated exceptional stability across various surfaces, quickly returning to a balanced position even when pushed. To enhance control, I built a custom wireless controller to manage speed and direction. For the final milestone, a competition with specific challenges, I modified the original design by adding two additional wheels for greater stability. A lifting mechanism, powered by two microservo motors, was integrated to pick up boxes from the ground, and the robot was equipped with a variety of sensors.
Published:
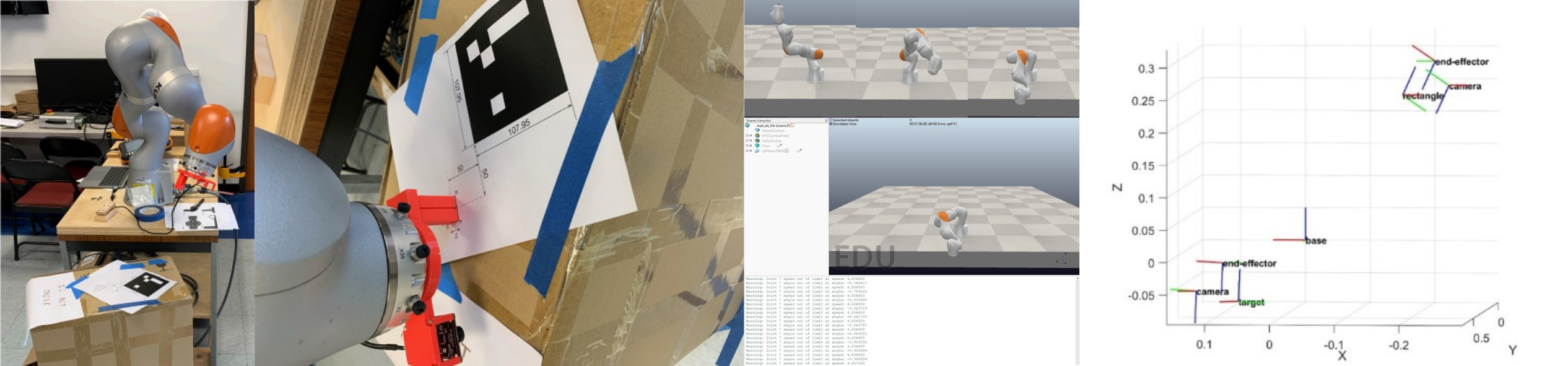
This project, part of the UD graduate course MEEG671: Introduction to Robotics under the supervision of Dr. Panagiotis Artemiadis, focuses on accurate end-effector positioning for a 7-DOF manipulator (LBR iiwa 7 R800, KUKA) using Aruco Marker recognition. The goal is to create a trajectory for the manipulator, equipped with a camera and a rectangular attachment, to precisely align the shape over a target based on the marker’s location and orientation. The manipulator begins at initial configuration and must avoid collisions during the motion. The project involves several key tasks:
Published:
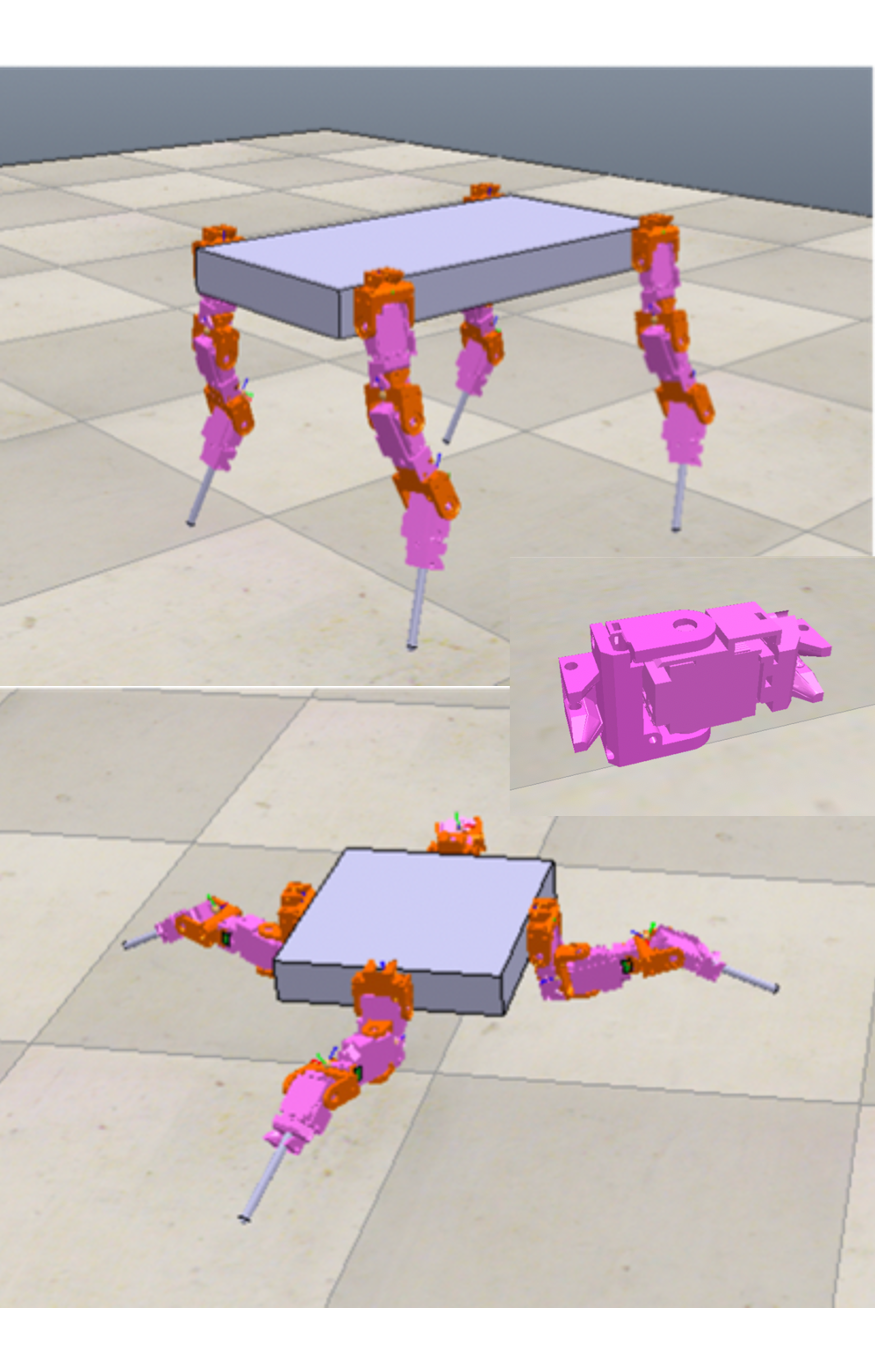
This project explores joint evolution in quadruped robots, using a joint design from the EPSRC-funded Autonomous Robot Evolution Project to construct two distinct robots within the V-REP (CoppeliaSim) simulation environment. A neuroevolutionary approach is employed to evolve the robots’ joints, with the aim of enhancing mobility and obtaining genetic traits associated with faster movement. The study involves evolving 100 generations, each consisting of 50 individuals, for a total of 5,000 individuals. The individual with the highest fitness score, determined by speed, is selected to retrieve its corresponding genome information, representing the optimal configuration under the fitness function. The two quadruped robots exhibit differing fitness values, suggesting that joint configuration impacts evolutionary outcomes. Therefore, to design the most effective robot, both the joints (controllers) and their configurations must be co-evolved. The results demonstrate that legged robots can adapt and increase mobility through evolutionary methods, making them capable of evolving based on specific performance requirements.
Published:
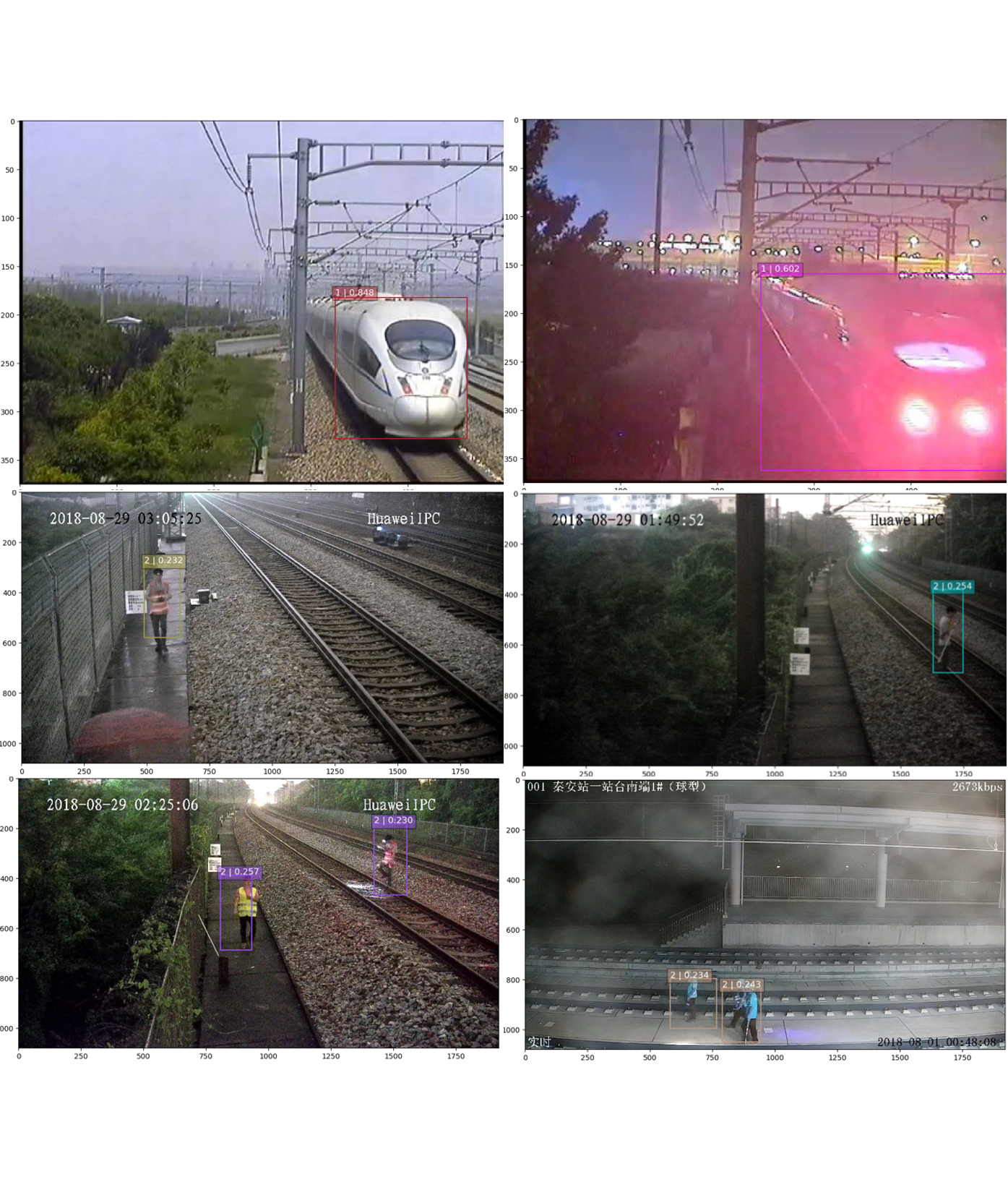
This project presents a high-speed railway foreign object detection system that automatically identifies foreign object in the railway environment, providing timely alerts to prevent potential accidents. By using deep learning techniques, the system significantly reduces the need for manual inspection while improving detection accuracy and efficiency. The core of the system is the application of the SSD (Single Shot MultiBox Detector) algorithm, based on convolutional neural networks (CNNs), to detect foreign objects along railway lines. The trained model demonstrates rapid and precise foreign object detection across diverse railway environments and varying weather conditions, ensuring robustness and adaptability. This system is of great significance to enhance railway safety operations.
Published:
This project aims to design and model an innovative underground circular parking system using Fischertechnik components. The system enables fully automated car storage and retrieval, maximizing space efficiency and minimizing the time required for parking. The focus is on developing a novel parking mechanism and control system, integrating sensors and optimized motion control algorithms to ensure smooth and efficient operation.

Published in MethodsX, 2023
Max Sokolich, David Rivas, Yanda Yang, Markos Duey, and Sambeeta Das
Published in AIR2023: Advances in Robotics, 2023
Max Sokolich, Sudipta Mallick, Zameer Hussain Shah, Yanda Yang, and Sambeeta Das
Published in 2023 International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), 2023
Yanda Yang, David Rivas, Max Sokolich, and Sambeeta Das
Published in 2023 International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), 2023
Logan E. Beaver, Zameer Hussain Shah, Max Sokolich, Alp Eren Yilmaz, Yanda Yang, Calin Belta, and Sambeeta Das
Published in 2023 International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), 2023
Yanda Yang, Fatma Ceren Kirmizitas, Max Sokolich, Alejandra Valencia, David Rivas, M. Çağatay Karakan, Alice E. White, Andreas A. Malikopoulos, and Sambeeta Das
Published in IEEE Transaction on Biomedical Engineering, 2024
Yanda Yang, Max Sokolich, Sudipta Mallick, and Sambeeta Das
Published in , 2025
Yanda Yang, Max Sokolich, Fatma Ceren Kirmizitas, Sambeeta Das, and Andreas A. Malikopoulos (ready to submit)
Published in , 2025
Hao Liu, Yanda Yang, Ting Wang, Jintao Yin & Hongqiang Wang (under evaluation)
Published:
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.